Mapping vehicles with solaris and the cowc dataset¶
solaris can assist with tasks beyond foundational mapping. Here, we’ll go through a full exercise of preprocessing the Cars Overhead With Context (cowc) dataset, training a segmentation model with solaris, mapping vehicles in a previously unseen test city, and finally scoring our results.
Let’s start with downloading our data. The cowc dataset can be downloaded here. Save it to a location where you will be able to preprocess the data and enable your GPU to find it.
Once all the data in the ground_truth_sets/ directory is downloaded, we’ll import our packages.
[1]:
import solaris as sol
import os
import glob
import gdal
from tqdm import tqdm
import cv2
import shutil
import pandas as pd
import numpy as np
from skimage.morphology import square, dilation
from matplotlib import pyplot as plt
from solaris.eval.iou import calculate_iou
import geopandas as gpd
Specify our directories for pre processing¶
[2]:
root= ".../cowc/datasets/ground_truth_sets/" ##cowc ground_truth_sets location after download
masks_out= ".../cowc/masks" ##output location for your masks for training
images_out= ".../cowc/tiles" ##output location for your tiled images for testing
masks_test_out= ".../cowc/masks_test" ##output location for your masks for testing
images_test_out= ".../cowc/tiles_test" ##output location for your tiled images for testing
Initialize a tiling function¶
Below is a function for tiling, solaris presently does not handle non-georeferenced pngs, but will in the future. This is a hold-over function until then.
[ ]:
def geo_tile(untiled_image_dir, tiles_out_dir, tile_size=544,
overlap=0.2, search=".png",Output_Channels=[1,2,3]):
"""Function to tile a set of images into smaller square chunks with embedded georeferencing info
allowing an end user to specify the size of the tile, the overlap of each tile, and when to discard
a tile if it contains blank data.
Arguments
---------
untiled_image_dir : str
Directory containing full or partial image strips that are untiled.
Imagery must be georeferenced.
tiles_out_dir : str
Output directory for tiled imagery.
tile_size : int
Extent of each tile in both X and Y directions in units of pixels.
Defaults to ``544`` .
overlap : float
The amount of overlap of each tile in float format. Should range between 0 and <1.
Defaults to ``0.2`` .
search : str
A string with a wildcard to search for files by type
Defaults to ".png"
Output_Channels : list
A list of the number of channels to output, 1 indexed.
Defaults to ``[1,2,3]`` .
Returns
-------
Tiled imagery directly output to the tiles_out_dir
"""
if not os.path.exists(tiles_out_dir):
os.makedirs(tiles_out_dir)
os.chdir(untiled_image_dir)
search2 = "*" + search
images = glob.glob(search2)
tile_size = int(tile_size)
for stackclip in images:
print(stackclip)
interp = gdal.Open(os.path.abspath(stackclip))
width = int(interp.RasterXSize)
height = int(interp.RasterYSize)
count = 0
for i in range(0, width, int(tile_size * (1 - overlap))):
for j in range(0, height, int(tile_size * (1 - overlap))):
Chip = [i, j, tile_size, tile_size]
count += 1
Tileout = tiles_out_dir + "/" + \
stackclip.split(search)[0] + "_tile_" + str(count) + ".tif"
output = gdal.Translate(Tileout, stackclip, srcWin=Chip, bandList=Output_Channels)
del output
print("Done")
Orgainze our data¶
The cowc dataset is a bit cluttered to start, some reogranization helps us down the road for smoother pre-processing of the dataset.
[ ]:
os.chdir(root)
dirs=glob.glob("*/")
for directory in dirs:
os.chdir(directory)
if not os.path.exists("Images"):
os.makedirs("Images")
os.makedirs("Masks")
os.makedirs("Extras")
xcfs=glob.glob("*.xcf")
txts=glob.glob("*.txt")
os.chdir("Images")
negatives=glob.glob("*Negatives.png")
masks=glob.glob("*Annotated_Cars.png")
for xcf in xcfs:
shutil.move(xcf,os.path.join(root,directory,"Extras",xcf))
for txt in txts:
shutil.move(txt,os.path.join(root,directory,"Extras",txt))
for negative in negatives:
shutil.move(negative,os.path.join(root,directory,"Extras",negative))
for mask in masks:
shutil.move(mask,os.path.join(root,directory,"Masks",mask))
images=glob.glob("*.png")
for image in images:
shutil.move(image,os.path.join(root,directory,"Images",image))
os.chdir(root)
Tile our masks and convert them to GeoTiffs¶
Presently solaris works with GeoTiffs exclusively, so converting pngs into this tifs is required to start. Furthermore tiling is required to feed our neural network. We will tile our masks and images sequentially, this process may take some time depending on your compute resources.
[ ]:
for directory in dirs:
if directory != "Utah_AGRC":
directory = os.path.join(root,directory,"Masks")
print(directory)
geo_tile(directory, masks_out, tile_size=512, overlap=0.1,search="*.png",Output_Channels=[1])
else:
directory = os.path.join(root,directory,"Masks")
print(directory)
geo_tile(directory, masks_out, tile_size=512, overlap=0,search="*.png",Output_Channels=[1]) #No overlap for testing.
[ ]:
for directory in dirs:
if directory != "Utah_AGRC":
directory = os.path.join(root,directory,"Images")
print(directory)
geo_tile(directory, images_out, tile_size=512, overlap=0.1,search="*.png",Output_Channels=[1,2,3])
else:
directory = os.path.join(root,directory,"Images")
print(directory)
geo_tile(directory, images_out, tile_size=512, overlap=0,search="*.png",Output_Channels=[1,2,3])
Dialate our masks to increase the size of our labels¶
Here we will perform a simple morphological dialation filter to increase our label size. This will make our masks large enough for our neural network to detect, but not large enough so they start to overlap one another when cars are located in close proximity to one another.
[ ]:
driver = gdal.GetDriverByName("GTiff")
os.chdir(masks_out)
images=glob.glob("*.tif")
for image in tqdm(images):
band=gdal.Open(image)
band = band.ReadAsArray()
band=dilation(band, square(9))
im_out = driver.Create(image,band.shape[1],band.shape[0],1,gdal.GDT_Byte)
im_out.GetRasterBand(1).WriteArray(band)
del im_out
Calculate some basic statistics for z-scoring (normalizing) our imagery¶
Z-scoring and normalizing our imagery can help to standardize it, improve generalizability, and potentially the transferability of a model to another location. It also helps to soften overly bright or dark areas.
[ ]:
M1=[]
M2=[]
M3=[]
S1=[]
S2=[]
S3=[]
driver = gdal.GetDriverByName("GTiff")
os.chdir(images_out)
images=glob.glob("*.tif")
for image in images:
band=gdal.Open(image).ReadAsArray()
M1.append(np.mean(band[0,:,:]))
M2.append(np.mean(band[1,:,:]))
M3.append(np.mean(band[2,:,:]))
S1.append(np.std(band[0,:,:]))
S2.append(np.std(band[1,:,:]))
S3.append(np.std(band[2,:,:]))
print("Save these numbers for your solaris.yml file for training and z-scoring (normalizing) your imagery")
print(np.mean(M1)/255)
print(np.mean(M2)/255)
print(np.mean(M3)/255)
print(np.mean(S1)/255)
print(np.mean(S2)/255)
print(np.mean(S3)/255)
Hold out a city for testing¶
Here we hold out Salt Lake City, Utah as a test city, and do some simple data reogranization.
[ ]:
if not os.path.exists(images_test_out):
os.makedirs(images_test_out)
os.chdir(images_out)
images = glob.glob("12TVL*")
for image in tqdm(images):
output = os.path.join(images_test_out,image)
shutil.move(image, output)
if not os.path.exists(masks_test_out):
os.makedirs(masks_test_out)
os.chdir(masks_out)
images = glob.glob("12TVL*")
for image in tqdm(images):
output = os.path.join(masks_test_out,image)
shutil.move(image, output)
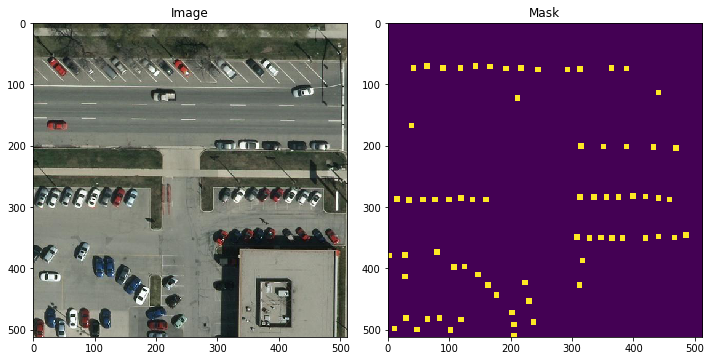
Review some of our masks and images¶
We can now review some our masks and images, you can change the integer value in the filename to see different tiles easily.
[3]:
image = os.path.join(images_test_out,"12TVL240120_tile_518.tif")
mask = os.path.join(masks_test_out,"12TVL240120_Annotated_Cars_tile_518.tif")
image = gdal.Open(image).ReadAsArray()
mask = gdal.Open(mask).ReadAsArray()
fig, ax = plt.subplots(ncols=2, figsize=(10, 5))
ax[0].imshow(np.moveaxis(image,0,2))
ax[0].set_title('Image')
ax[1].imshow(mask)
ax[1].set_title('Mask')
plt.tight_layout()
Create a csv file that lists our images and our masks for training and testing¶
solaris requires our images and masks to be organized coherently and documents where each image is in a tabular csv format. These csvs will be linked to in our yml file and can then be used to read in the data.
[ ]:
data = []
images = []
image_folder=images_out
label_folder=masks_out
os.chdir(label_folder)
labels=glob.glob("*.tif")
for x in labels:
z = x.split('_Annotated_Cars')[0] + x.split('_Annotated_Cars')[1]
os.chdir(image_folder)
image=glob.glob(z)
if len(image) != 1:
os.chdir(label_folder)
os.remove(x)
else:
images.append(image[0])
for image, label in zip(images,labels):
image = os.path.join(image_folder,image)
label = os.path.join(label_folder,label)
data.append((image, label))
df = pd.DataFrame(data, columns=['image', 'label'])
df.to_csv(os.path.join(root,"train_data_cowc2.csv"))
[ ]:
data = []
images = []
image_folder=images_test_out
label_folder=masks_test_out
os.chdir(label_folder)
labels=glob.glob("*.tif")
for x in labels:
z = x.split('_Annotated_Cars')[0] + x.split('_Annotated_Cars')[1]
os.chdir(image_folder)
image=glob.glob(z)
if len(image) != 1:
os.chdir(label_folder)
os.remove(x)
else:
images.append(image[0])
for image, label in zip(images,labels):
image = os.path.join(image_folder,image)
label = os.path.join(label_folder,label)
data.append((image, label))
df = pd.DataFrame(data, columns=['image', 'label'])
df.to_csv(os.path.join(root,"test_data_cowc2.csv"))
Edit your .yml file and begin training your model¶
An example yml file is provided here. Be sure the train paramenter is set to True. Furthermore, be sure to pass the paths to your csvs that you just created into the training_data_csv and inference_data_csv prompts. Optionally you may want to alter the batch_size or val_holdout_frac which is the fraction of images randomly sampled out of your training set to help your model learn as it
trains. Also ensure that your Normalize values are correct.
When you’re ready, set the path you your modified yml file and run the prompt below. Training time can take multiple hours.
[ ]:
config = sol.utils.config.parse('/path/to/yml/xdxd_vehicleDetection.yml')
trainer = sol.nets.train.Trainer(config)
trainer.train()
Time to inference¶
Be sure to edit your yml to enable infer mode and then we can start inferencing to find the vehicles in Salt Lake City.
[ ]:
inf_df = sol.nets.infer.get_infer_df(config)
inferer = sol.nets.infer.Inferer(config)
inferer(inf_df)
Specify our directories for post-processing¶
[4]:
inference_output=".../cowc/inference_out" ## The location that you output inference results to as specified in your yml.
inference_output_bin=".../cowc/inference_out_binary" ## A location to store binarized outputs
inference_polygon_dir=".../cowc/inference_polys" ## Outputs polygonized
ground_truth_polygon_dir=".../cowc/ground_truth_polys" ## Ground Truth Outputs polygonized
Post-processing- binarize our masks and convert them to polygons¶
Here we will binarize our outputs and convert a mask to a 1/0 value for car/no car. Following this we will convert the masks to polygons. You may want to adjust the cutoff value for binarization based on your own experiments or change this if you chose not to z-score your imagery.
[ ]:
from solaris.vector.mask import mask_to_poly_geojson
driver = gdal.GetDriverByName("GTiff")
os.chdir(inference_output_bin)
images=glob.glob("*.tif")
for image in tqdm(images):
band=gdal.Open(image)
band = band.ReadAsArray()
band[np.where((band > 0))] = 1 ### Note that these values may be model specific and change slightly due to reimplementations. For simplicity I threshold at 0.
band[np.where((band <= 0))] = 0
im_out = driver.Create(os.path.join(inference_output_bin,image),band.shape[1],band.shape[0],1,gdal.GDT_Byte)
im_out.GetRasterBand(1).WriteArray(band)
del im_out
output=os.path.join(inference_polygon_dir,image.split(".")[0]+".geojson")
gdf=mask_to_poly_geojson(band,reference_im=os.path.join(images_test_out,image),min_area=1,simplify=True)
if not gdf.empty:
gdf.to_file(output, driver='GeoJSON')
os.chdir(masks_test_out)
images=glob.glob("*.tif")
for image in tqdm(images):
band=gdal.Open(image)
band = band.ReadAsArray()
output=os.path.join(ground_truth_polygon_dir,image.split(".")[0]+".geojson")
image=image.split("_Annotated_Cars")[0]+image.split("_Annotated_Cars")[1]
gdf=mask_to_poly_geojson(band,reference_im=os.path.join(images_test_out,image),min_area=1,simplify=True)
if not gdf.empty:
gdf.to_file(output, driver='GeoJSON')
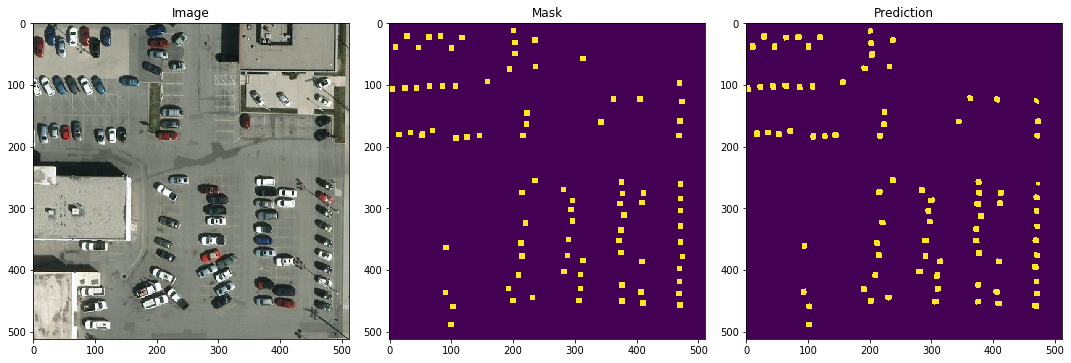
Check out our results¶
Below we can inspect our results, and compare vs. the ground truth mask. Again the integer value can be changed in each filename to inspect different tiles.
[5]:
image = os.path.join(images_test_out,"12TVL240120_tile_519.tif")
mask = os.path.join(masks_test_out,"12TVL240120_Annotated_Cars_tile_519.tif")
prediction = os.path.join(inference_output_bin,"12TVL240120_tile_519.tif")
image = gdal.Open(image).ReadAsArray()
mask = gdal.Open(mask).ReadAsArray()
prediction = gdal.Open(prediction).ReadAsArray()
fig, ax = plt.subplots(ncols=3, figsize=(15, 5))
ax[0].imshow(np.moveaxis(image,0,2))
ax[0].set_title('Image')
ax[1].imshow(mask)
ax[1].set_title('Ground Truth Mask')
ax[2].imshow(prediction)
ax[2].set_title('Prediction')
plt.tight_layout()
Initialize a few more functions for scoring our results.¶
Here we will work with the solaris.eval.iou.calculate_iou() function to calculate intersection over union and from this precision and recall. This can be used to score how well our model is performing at detecting cars. The calculate_ious function’s arguments:
pred_poly: Ashapely.Polygon. This is a prediction polygon to test.test_data_GDF: Ageopandas.GeoDataFrame. This is GeoDataFrame of ground truth polygons to testpred_polyagainst.
Using the function as is will calculate precision, but we can actually “invert” the inputs to calculate recall as well. For the recall caluclation instead of supplying a prediciton polygon we will supply a ground-truth polygon. Furthermore, instead of supplying a ground truth geodataframe containing all of our ground truth polygons for a tile we will supply a geodataframe containing all of the prediction polygons for a tile.
We can initialize the functions below.
[ ]:
#Wrapper functions for calculate_iou
def precision_calc(proposal_polygons_dir,groundtruth_polygons_dir,file_format="geojson"):
ious=[]
os.chdir(proposal_polygons_dir)
search = "*" + file_format
proposal_geojsons=glob.glob(search)
for geojson in tqdm(proposal_geojsons):
ground_truth_poly = os.path.join(groundtruth_polygons_dir,geojson)
if os.path.exists(ground_truth_poly):
ground_truth_gdf=gpd.read_file(ground_truth_poly)
proposal_gdf=gpd.read_file(geojson)
for index, row in (proposal_gdf.iterrows()):
iou=calculate_iou(row.geometry, ground_truth_gdf)
if 'iou_score' in iou.columns:
iou=iou.iou_score.max()
ious.append(iou)
else:
iou=0
ious.append(iou)
return ious
def recall_calc(proposal_polygons_dir,groundtruth_polygons_dir,file_format="geojson"):
ious=[]
os.chdir(groundtruth_polygons_dir)
search = "*" + file_format
gt_geojsons=glob.glob(search)
for geojson in tqdm(gt_geojsons):
proposal_poly = os.path.join(proposal_polygons_dir,geojson)
if os.path.exists(proposal_poly):
proposal_gdf=gpd.read_file(proposal_poly)
gt_gdf=gpd.read_file(geojson)
for index, row in (gt_gdf.iterrows()):
iou=calculate_iou(row.geometry, proposal_gdf)
if 'iou_score' in iou.columns:
iou=iou.iou_score.max()
ious.append(iou)
else:
iou=0
ious.append(iou)
return ious
def f1_score(precision_ious,recall_ious,threshold=0.5):
items=[]
for i in precision_ious:
if i >=threshold:
items.append(1)
else:
items.append(0)
precision= np.mean(items)
items=[]
for i in recall_ious:
if i >=threshold:
items.append(1)
else:
items.append(0)
recall= np.mean(items)
f1 = 2* precision * recall/(precision + recall)
return f1
def simple_average_precision(precisions_ious,threshold=0.5):
items=[]
for i in precision_ious:
if i >=threshold:
items.append(1)
else:
items.append(0)
precision= np.mean(items)
return precision
Score our results¶
As a final step we can score our outputs against the ground truth to report scores. Without these scores all you really have is a pretty picture. We report both an F1 Score and an average precision score.
[ ]:
# Score our results
precision_ious = precision_calc(inference_polygon_dir,ground_truth_polygon_dir,file_format="geojson")
recall_ious = recall_calc(inference_polygon_dir,ground_truth_polygon_dir,file_format="geojson")
print(f1_score(precision_ious,recall_ious,threshold=0.25), "F1 Score@0.25")
print(f1_score(precision_ious,recall_ious,threshold=0.5), "F1 Score@0.5") ## The traditional SpaceNet metric
print(simple_average_precision(precision_ious,threshold=0.25), "AP@0.25") ## Acceptable for small objects like cars!
print(simple_average_precision(precision_ious,threshold=0.5), "AP@0.5")